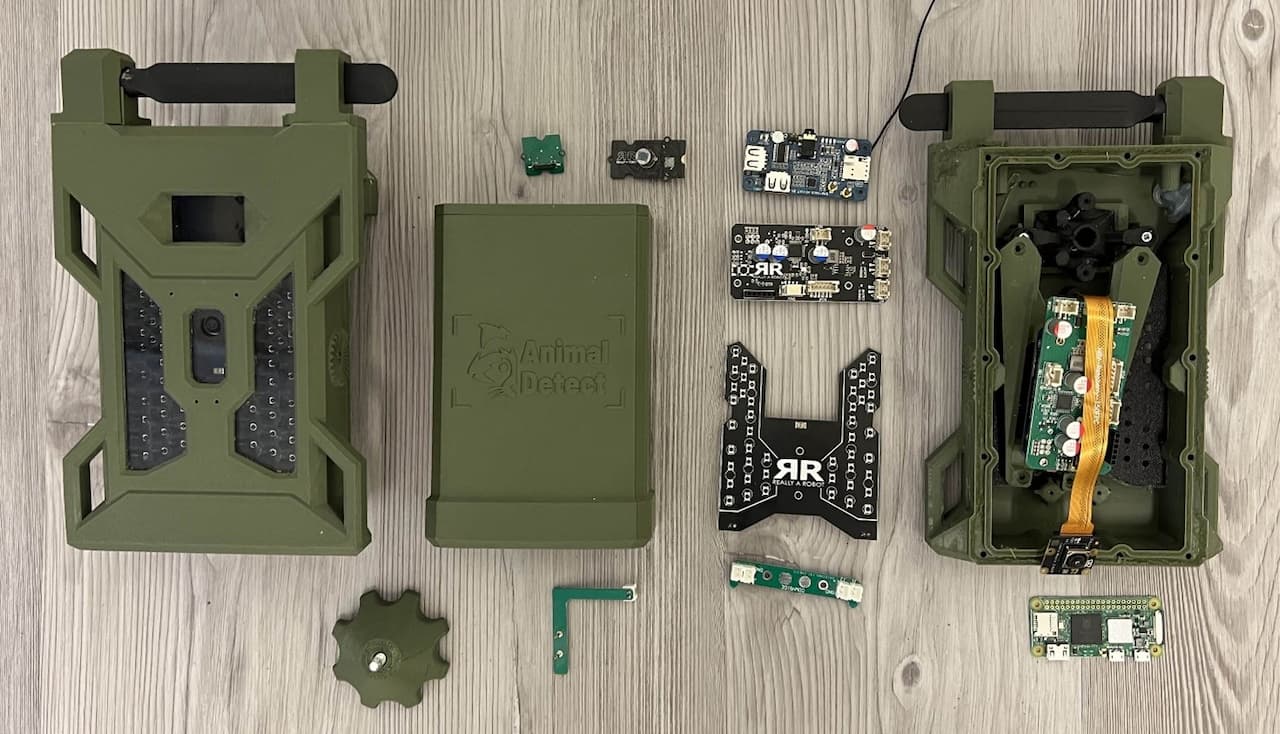
Back when we were building wildlife cameras, one of the main complaints about existing solutions was the empty images. By "empty," I mean images without animals.
To tackle this, I experimented with background subtraction and various image-processing methods. But in the end, we used an AI model to give us a simple yes-or-no answer: 𝑰𝒔 𝒕𝒉𝒆𝒓𝒆 𝒂𝒏 𝒂𝒏𝒊𝒎𝒂𝒍 𝒊𝒏 𝒕𝒉𝒊𝒔 𝒊𝒎𝒂𝒈𝒆?
Automate your camera trap image analysis with Animal Detect
Join today to analyze thousands of images in minutes using latest AI models.

If not, we filtered out those images. Some of them are featured in this GIF. But then Rasmus Holst, who was working with us at the time, asked a great question: 𝑨𝒓𝒆 𝒕𝒉𝒆 𝒊𝒎𝒂𝒈𝒆𝒔 𝒕𝒓𝒖𝒍𝒚 𝒆𝒎𝒑𝒕𝒚? And down the rabbit hole we went… 🐇
A neuron (or a few) sparked back to life when I was listening to the Swedish radio program “Naturmorgon” (Nature Morning).
Tim R. Hofmeester mentioned how different mustelids (like weasels) leave unique patterns in the snow. Some zig-zag with their tails, while others just leave footprints.
Now, the snow levels in Denmark this year have been a bit disappointing, but I remembered how image subtraction often revealed footprints. It got me thinking, could a top-view camera, taking interval-based images, track animals by their prints or snow patterns?
Honestly, I have no clue how well it would work, but it’s a cool idea! And while exploring this rabbit hole before, I realized there’s so much more we can do with these “not so empty” images.
For example: meteorological institutes are interested in local weather data from images, snow levels, water levels, even temperature If you can ensure its correct) or barometric pressure, to validate models and improve predictions. Some wildlife cameras already have sensors for temperature and pressure, but snow and water can sometimes be estimated directly from the images.
When I spoke with representatives from the Danmarks Meteorologiske Institut, they mentioned that their Dutch counterparts had experimented with analyzing snow using webcam footage.
And let’s not forget the other potential uses: time-lapses, fauna tracking, and more ways to turn these “not so empty” images into something valuable 😊